
























作品詳情
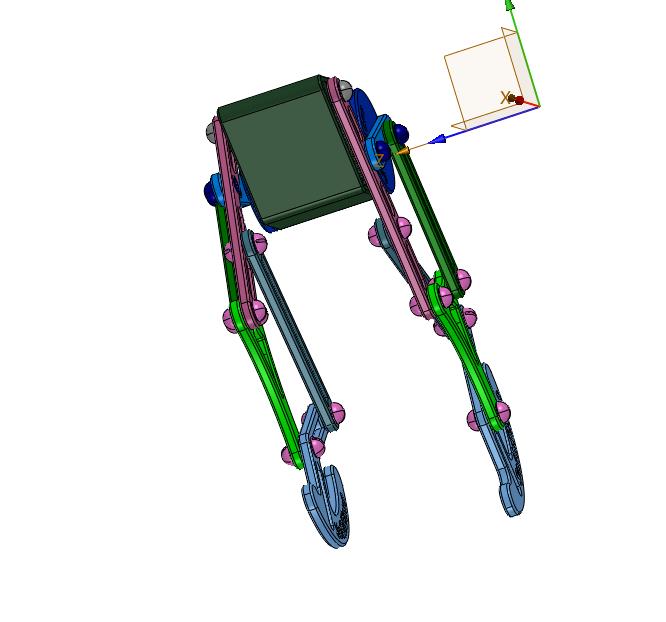
雙腳機器人科學(xué)實驗涉及設(shè)計并制造一種能夠模擬人類行走的機器人。這種機器人具備高度復(fù)雜的機械結(jié)構(gòu),包括精密的關(guān)節(jié)和驅(qū)動器,使其能夠完成各種復(fù)雜的動作。在實驗中,通過編程控制和傳感器反饋系統(tǒng),機器人能夠響應(yīng)環(huán)境變化并調(diào)整行走策略。此實驗旨在驗證機器人的穩(wěn)定性、靈活性和效率,為未來的實際應(yīng)用提供重要數(shù)據(jù)支持。



平diy桌面級快速成型3D打印機")




動臺袋子印畫設(shè)備")










